图像阈值
作者|OpenCV-Python Tutorials
编译|Vincent
来源|OpenCV-Python Tutorials
目标
- 在本教程中,您将学习简单阈值,自适应阈值和Otsu阈值。
- 你将学习函数cv.threshold和cv.adaptiveThreshold。
简单阈值
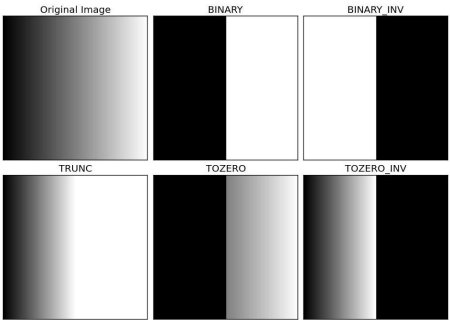
在这里,问题直截了当。对于每个像素,应用相同的阈值。如果像素值小于阈值,则将其设置为0,否则将其设置为最大值。函数cv.threshold用于应用阈值。第一个参数是源图像,它应该是灰度图像。第二个参数是阈值,用于对像素值进行分类。第三个参数是分配给超过阈值的像素值的最大值。OpenCV提供了不同类型的阈值,这由函数的第四个参数给出。通过使用cv.THRESH_BINARY类型。所有简单的阈值类型为:
- cv.THRESH_BINARY
- cv.THRESH_BINARY_INV
- cv.THRESH_TRUNC
- cv.THRESH_TOZERO
- cv.THRESH_TOZERO_INV
请通过类型的文档来观察区别。
该方法返回两个输出。第一个是使用的阈值,第二个输出是阈值后的图像。
此代码比较了不同的简单阈值类型:
import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt
img = cv.imread('gradient.png',0)
ret,thresh1 = cv.threshold(img,127,255,cv.THRESH_BINARY)
ret,thresh2 = cv.threshold(img,127,255,cv.THRESH_BINARY_INV)
ret,thresh3 = cv.threshold(img,127,255,cv.THRESH_TRUNC)
ret,thresh4 = cv.threshold(img,127,255,cv.THRESH_TOZERO)
ret,thresh5 = cv.threshold(img,127,255,cv.THRESH_TOZERO_INV)
titles = ['Original Image','BINARY','BINARY_INV','TRUNC','TOZERO','TOZERO_INV']
images = [img, thresh1, thresh2, thresh3, thresh4, thresh5]
for i in xrange(6):
plt.subplot(2,3,i+1),plt.imshow(images[i],'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
注意 为了绘制多个图像,我们使用
plt.subplot()函数。请查看matplotlib文档以获取更多详细信息。
该代码产生以下结果:
自适应阈值
在上一节中,我们使用一个全局值作为阈值。但这可能并非在所有情况下都很好,例如,如果图像在不同区域具有不同的光照条件。在这种情况下,自适应阈值阈值化可以提供帮助。在此,算法基于像素周围的小区域确定像素的阈值。因此,对于同一图像的不同区域,我们获得了不同的阈值,这为光照度变化的图像提供了更好的结果。
除上述参数外,方法cv.adaptiveThreshold还包含三个输入参数:
该adaptiveMethod决定阈值是如何计算的:
cv.ADAPTIVE_THRESH_MEAN_C::阈值是邻近区域的平均值减去常数C。 cv.ADAPTIVE_THRESH_GAUSSIAN_C:阈值是邻域值的高斯加权总和减去常数C。
该BLOCKSIZE确定附近区域的大小,C是从邻域像素的平均或加权总和中减去的一个常数。
下面的代码比较了光照变化的图像的全局阈值和自适应阈值:
结果:

Otsu的二值化
在全局阈值化中,我们使用任意选择的值作为阈值。相反,Otsu的方法避免了必须选择一个值并自动确定它的情况。
考虑仅具有两个不同图像值的图像(双峰图像),其中直方图将仅包含两个峰。一个好的阈值应该在这两个值的中间。类似地,Otsu的方法从图像直方图中确定最佳全局阈值。
为此,使用了cv.threshold作为附加标志传递。阈值可以任意选择。然后,算法找到最佳阈值,该阈值作为第一输出返回。
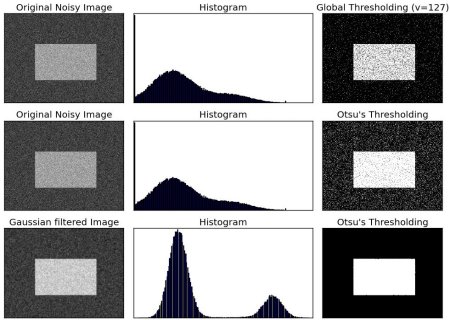
查看以下示例。输入图像为噪点图像。在第一种情况下,采用值为127的全局阈值。在第二种情况下,直接采用Otsu阈值法。在第三种情况下,首先使用5x5高斯核对图像进行滤波以去除噪声,然后应用Otsu阈值处理。了解噪声滤波如何改善结果。
import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt
img = cv.imread('noisy2.png',0)
# 全局阈值
ret1,th1 = cv.threshold(img,127,255,cv.THRESH_BINARY)
# Otsu阈值
ret2,th2 = cv.threshold(img,0,255,cv.THRESH_BINARY+cv.THRESH_OTSU)
# 高斯滤波后再采用Otsu阈值
blur = cv.GaussianBlur(img,(5,5),0)
ret3,th3 = cv.threshold(blur,0,255,cv.THRESH_BINARY+cv.THRESH_OTSU)
# 绘制所有图像及其直方图
images = [img, 0, th1,
img, 0, th2,
blur, 0, th3]
titles = ['Original Noisy Image','Histogram','Global Thresholding (v=127)',
'Original Noisy Image','Histogram',"Otsu's Thresholding",
'Gaussian filtered Image','Histogram',"Otsu's Thresholding"]
for i in xrange(3):
plt.subplot(3,3,i*3+1),plt.imshow(images[i*3],'gray')
plt.title(titles[i*3]), plt.xticks([]), plt.yticks([])
plt.subplot(3,3,i*3+2),plt.hist(images[i*3].ravel(),256)
plt.title(titles[i*3+1]), plt.xticks([]), plt.yticks([])
plt.subplot(3,3,i*3+3),plt.imshow(images[i*3+2],'gray')
plt.title(titles[i*3+2]), plt.xticks([]), plt.yticks([])
plt.show()
结果:
Otsu的二值化如何实现?
本节演示了Otsu二值化的Python实现,以展示其实际工作方式。如果您不感兴趣,可以跳过此步骤。
由于我们正在处理双峰图像,因此Otsu的算法尝试找到一个阈值(t),该阈值将由关系式给出的加权类内方差最小化:
\[\sigma_w^2(t) = q_1(t)\sigma_1^2(t)+q_2(t)\sigma_2^2(t)\]其中
\[q_1(t) = \sum_{i=1}^{t} P(i) \quad \& \quad q_2(t) = \sum_{i=t+1}^{I} P(i)\] \[\mu_1(t) = \sum_{i=1}^{t} \frac{iP(i)}{q_1(t)} \quad \& \quad \mu_2(t) = \sum_{i=t+1}^{I} \frac{iP(i)}{q_2(t)}\] \[\sigma_1^2(t) = \sum_{i=1}^{t} [i-\mu_1(t)]^2 \frac{P(i)}{q_1(t)} \quad \& \quad \sigma_2^2(t) = \sum_{i=t+1}^{I} [i-\mu_2(t)]^2 \frac{P(i)}{q_2(t)}\]实际上,它找到位于两个峰值之间的t值,以使两个类别的差异最小。它可以简单地在Python中实现,如下所示:
img = cv.imread('noisy2.png',0)
blur = cv.GaussianBlur(img,(5,5),0)
# 寻找归一化直方图和对应的累积分布函数
hist = cv.calcHist([blur],[0],None,[256],[0,256])
hist_norm = hist.ravel()/hist.max()
Q = hist_norm.cumsum()
bins = np.arange(256)
fn_min = np.inf
thresh = -1
for i in xrange(1,256):
p1,p2 = np.hsplit(hist_norm,[i]) # 概率
q1,q2 = Q[i],Q[255]-Q[i] # 对类求和
b1,b2 = np.hsplit(bins,[i]) # 权重
# 寻找均值和方差
m1,m2 = np.sum(p1*b1)/q1, np.sum(p2*b2)/q2
v1,v2 = np.sum(((b1-m1)**2)*p1)/q1,np.sum(((b2-m2)**2)*p2)/q2
# 计算最小化函数
fn = v1*q1 + v2*q2
if fn < fn_min:
fn_min = fn
thresh = i
# 使用OpenCV函数找到otsu的阈值
ret, otsu = cv.threshold(blur,0,255,cv.THRESH_BINARY+cv.THRESH_OTSU)
print( "{} {}".format(thresh,ret) )
其他资源
- Digital Image Processing, Rafael C. Gonzalez
练习题
- Otsu的二值化有一些优化。您可以搜索并实现它。