#图像的几何变换
作者|OpenCV-Python Tutorials
编译|Vincent
来源|OpenCV-Python Tutorials
目标
- 学习将不同的几何变换应用到图像上,如平移、旋转、仿射变换等。
- 你会看到这些函数: cv.getPerspectiveTransform
变换
OpenCV提供了两个转换函数cv.warpAffine和cv.warpPerspective,您可以使用它们进行各种转换。cv.warpAffine采用2x3转换矩阵,而cv.warpPerspective采用3x3转换矩阵作为输入。
缩放
缩放只是调整图像的大小。为此,OpenCV带有一个函数cv.resize()。图像的大小可以手动指定,也可以指定缩放比例。也可使用不同的插值方法。首选的插值方法是cv.INTER_AREA用于缩小,cv.INTER_CUBIC(慢)和cv.INTER_LINEAR用于缩放。默认情况下,出于所有调整大小的目的,使用的插值方法为cv.INTER_LINEAR。您可以使用以下方法调整输入图像的大小:
import numpy as np
import cv2 as cv
img = cv.imread('messi5.jpg')
res = cv.resize(img,None,fx=2, fy=2, interpolation = cv.INTER_CUBIC)
#或者
height, width = img.shape[:2]
res = cv.resize(img,(2*width, 2*height), interpolation = cv.INTER_CUBIC)
平移
平移是物体位置的移动。如果您知道在(x,y)方向上的位移,则将其设为($t_x$,$t_y$),你可以创建转换矩阵$\mathbf{M}$,如下所示:
\[M = \begin{bmatrix} 1 & 0 & t_x \\ 0 & 1 & t_y \end{bmatrix}\]您可以将其放入np.float32类型的Numpy数组中,并将其传递给cv.warpAffine函数。参见下面偏移为(100, 50)的示例:
import numpy as np
import cv2 as cv
img = cv.imread('messi5.jpg',0)
rows,cols = img.shape
M = np.float32([[1,0,100],[0,1,50]])
dst = cv.warpAffine(img,M,(cols,rows))
cv.imshow('img',dst)
cv.waitKey(0)
cv.destroyAllWindows()
警告
cv.warpAffine函数的第三个参数是输出图像的大小,其形式应为(width,height)。记住width =列数,height =行数。
你将看到下面的结果:
![]()
旋转
图像旋转角度为$θ$是通过以下形式的变换矩阵实现的:
\[M = \begin{bmatrix} cos\theta & -sin\theta \\ sin\theta & cos\theta \end{bmatrix}\]但是OpenCV提供了可缩放的旋转以及可调整的旋转中心,因此您可以在自己喜欢的任何位置旋转。修改后的变换矩阵为
\[\begin{bmatrix} \alpha & \beta & (1- \alpha ) \cdot center.x - \beta \cdot center.y \\ - \beta & \alpha & \beta \cdot center.x + (1- \alpha ) \cdot center.y \end{bmatrix}\]其中:
\[\begin{array}{l} \alpha = scale \cdot \cos \theta , \\ \beta = scale \cdot \sin \theta \end{array}\]为了找到此转换矩阵,OpenCV提供了一个函数cv.getRotationMatrix2D。请检查以下示例,该示例将图像相对于中心旋转90度而没有任何缩放比例。
img = cv.imread('messi5.jpg',0)
rows,cols = img.shape
# cols-1 和 rows-1 是坐标限制
M = cv.getRotationMatrix2D(((cols-1)/2.0,(rows-1)/2.0),90,1)
dst = cv.warpAffine(img,M,(cols,rows))
查看结果:

仿射变换
在仿射变换中,原始图像中的所有平行线在输出图像中仍将平行。为了找到变换矩阵,我们需要输入图像中的三个点及其在输出图像中的对应位置。然后cv.getAffineTransform将创建一个2x3矩阵,该矩阵将传递给cv.warpAffine。
查看以下示例,并查看我选择的点(以绿色标记):
img = cv.imread('drawing.png')
rows,cols,ch = img.shape
pts1 = np.float32([[50,50],[200,50],[50,200]])
pts2 = np.float32([[10,100],[200,50],[100,250]])
M = cv.getAffineTransform(pts1,pts2)
dst = cv.warpAffine(img,M,(cols,rows))
plt.subplot(121),plt.imshow(img),plt.title('Input')
plt.subplot(122),plt.imshow(dst),plt.title('Output')
查看结果:

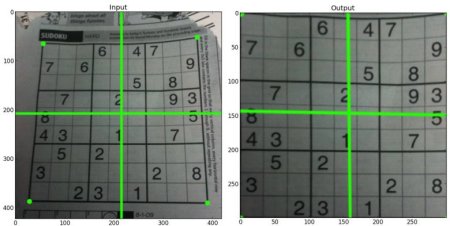
透视变换
对于透视变换,您需要3x3变换矩阵。即使在转换后,直线也将保持直线。要找到此变换矩阵,您需要在输入图像上有4个点,在输出图像上需要相应的点。在这四个点中,其中三个不应共线。然后可以通过函数cv.getPerspectiveTransform找到变换矩阵。然后将cv.warpPerspective应用于此3x3转换矩阵。
请参见下面的代码:
img = cv.imread('sudoku.png')
rows,cols,ch = img.shape
pts1 = np.float32([[56,65],[368,52],[28,387],[389,390]])
pts2 = np.float32([[0,0],[300,0],[0,300],[300,300]])
M = cv.getPerspectiveTransform(pts1,pts2)
dst = cv.warpPerspective(img,M,(300,300))
plt.subplot(121),plt.imshow(img),plt.title('Input')
plt.subplot(122),plt.imshow(dst),plt.title('Output')
plt.show()
结果:
其他资源
- “Computer Vision: Algorithms and Applications”, Richard Szeliski